


Les filtres pour le calcul des niveaux moyens journaliers
Traditionnellement, les observations du niveau de la mer sont enregistrées en hauteurs horaires. Le niveau moyen s’obtient alors en effectuant une combinaison linéaire de ces hauteurs (Bessero, 1985).
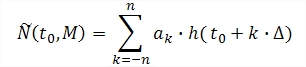
Fig. 1 : Formule de calcul du niveau moyen, où M=2n+1, ∆ le pas d’échantillonnage , ak une suite de coefficients réels.
Plusieurs filtres linéaires de ce type existent pour le calcul du niveau moyen journalier de la mer. Théoriquement, plus le vecteur ak est grand, plus le filtre est efficace dans la réduction des effets de la marée (il prend en compte plus d’observations), mais plus son application sera limitée dans le cas d’observations marégraphiques contenant des lacunes. Le filtre de Demerliac est un bon compromis recommandé par le SHOM. Il utilise un vecteur ak symétrique de 71 coefficients (voir table ci-dessous).
| k | Moyenne de 25 hauteurs 25*ak | Filtre de Doodson 30*ak | Filtre "Tide Killer" de Munk 10^7*ak | Filtre de Godin 14400*ak | Filtre de Demerliac 24576*ak |
|---|---|---|---|---|---|
| 0 | 1 | 0 | 395287 | 444 | 768 |
| 1 | 1 | 2 | 386839 | 443 | 766 |
| 2 | 1 | 1 | 370094 | 440 | 762 |
| 3 | 1 | 1 | 354118 | 435 | 752 |
| 4 | 1 | 2 | 338603 | 428 | 738 |
| 5 | 1 | 0 | 325633 | 419 | 726 |
| 6 | 1 | 1 | 314959 | 408 | 704 |
| 7 | 1 | 1 | 300054 | 395 | 678 |
| 8 | 1 | 0 | 278167 | 380 | 658 |
| 9 | 1 | 2 | 251492 | 363 | 624 |
| 10 | 1 | 0 | 234033 | 344 | 586 |
| 11 | 1 | 1 | 219260 | 323 | 558 |
| 12 | 1 | 1 | 208050 | 300 | 512 |
| 13 | 0 | 195518 | 276 | 465 | |
| 14 | 1 | 180727 | 253 | 435 | |
| 15 | 0 | 165525 | 231 | 392 | |
| 16 | 0 | 146225 | 210 | 351 | |
| 17 | 1 | 122665 | 190 | 325 | |
| 18 | 0 | 101603 | 171 | 288 | |
| 19 | 1 | 85349 | 153 | 253 | |
| 20 | 72261 | 136 | 231 | ||
| 21 | 60772 | 120 | 200 | ||
| 22 | 47028 | 105 | 171 | ||
| 23 | 30073 | 91 | 153 | ||
| 24 | 13307 | 78 | 128 | ||
| 25 | 66 | 105 | |||
| 26 | 55 | 91 | |||
| 27 | 45 | 72 | |||
| 28 | 36 | 55 | |||
| 29 | 28 | 45 | |||
| 30 | 21 | 32 | |||
| 31 | 15 | 21 | |||
| 32 | 10 | 15 | |||
| 33 | 6 | 8 | |||
| 34 | 3 | 3 | |||
| 35 | 1 | 1 |
Tab. 1 : Coefficients utilisés pour différents filtres linéaires. Pour chacun des filtres, ak=a-k.
Source : Bessero (1985)
Quelques liens utiles :
– Script R du filtrage de Demerliac
– Script R du filtrage de Doodson
– Site du logiciel R
[//]
Référence bibliographique :
Bessero G. (1985). Marées. SHOM, Fascicule 2, chap. IX à XV.



