Les mesures des marégraphes représentent les premières observations directes du niveau de la mer effectuées de manière continue et automatique par l'Homme. L'analyse des données marégraphiques nous permet de mieux appréhender les mécanismes physiques qui sont à l'origine de la variabilité de cette grandeur. Il y a deux siècles, Pierre Simon de Laplace [1749-1827] s'appuyait sur des observations du niveau de la mer effectuées à Brest entre 1714 et 1717 pour souligner les limites de la théorie statique des marées d'Isaac Newton [1642-1727], et, pour énoncer les lois générales des marées en un lieu en introduisant des considérations dynamiques. Aujourd'hui, les séries temporelles marégraphiques enregistrées en quelques observatoires séculaires sont des données d'une valeur scientifique inestimable pour l'étude et la compréhension des variations à long terme du niveau des mers liées à des changements climatiques récents.
Dans ce chapitre, nous commençons par présenter les marégraphes et leurs données; les utilisateurs et les applications; les organismes qui collectent et archivent les données. Ensuite, nous analysons les séries temporelles marégraphiques qui sont diffusées par le service permanent du niveau moyen des mers (PSMSL) dans l'optique d'étudier les variations séculaires récentes du niveau des mers. Le traitement statistique des résultats de l'analyse des données met en évidence les différents problèmes auxquels on se heurte lorsqu'on cherche à estimer une tendance globale à long terme du niveau des mers à partir de ces données. Enfin, nous retraçons l'évolution de cette problématique au cours de ces dernières décennies à travers une critique des différentes approches imaginées par quelques auteurs qui se sont penchés sur la question.
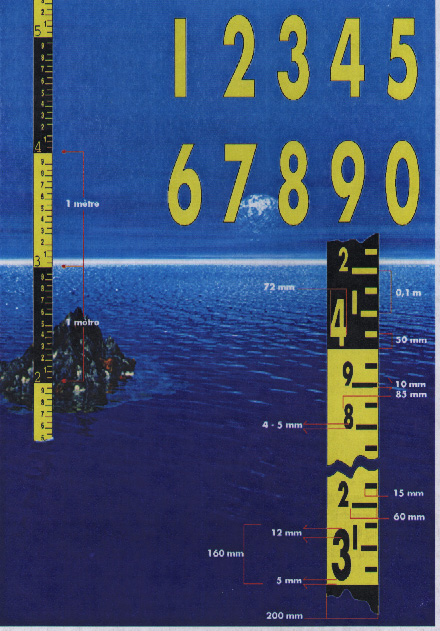
Les premières données enregistrées du niveau de la mer datent du début du XVIIIe siècle. Elles sont issues des lectures de hauteur d'eau effectuées par un observateur sur une échelle graduée, souvent désignée par échelle de marée (cf. figure 9). Cette technique simple est limitée par l'intervention humaine, d'une part en précision, et d'autre part en exploitation lorsqu'on cherche à établir des séries de mesures continues en un lieu. Cependant, elle est encore assez répandue, en particulier pour le contrôle et l'étalonnage des marégraphes.
Les marégraphes mécaniques, connus sous le nom de marégraphes à flotteur, ont été développés et implantés sur les côtes vers le milieu du XIXe siècle pour accomplir le travail pénible et routinier associé à l'échelle de marée. La mise au point de ce type de marégraphe est attribuée à l'Ingénieur Hydrographe Chazallon [Simon, 1993]. Son principe de mesure est schématisé dans la figure 10. Le déplacement vertical d'un flotteur est réduit d'un facteur d'échelle donné, et, transmis à un style inscripteur par un ensemble plus ou moins compliqué de fils, de poulies, de contrepoids et d'engrenages démultiplicateurs. Le style marque un papier, calé autour d'un cylindre qui est animé d'un mouvement de rotation uniforme, de vitesse connue, en général un tour par jour. On obtient ainsi un enregistrement analogique sous forme de rouleau de papier, appelé marégramme, dont la courbe de marée représente les hauteurs d'eau instantanées en fonction du temps (cf. figure 11).
Figure 9 : Vue d'artiste d'une échelle de marée (A. Pasquier).
Selon une enquête réalisée au début des années 80 par le PSMSL, sous les auspices de la Commission Océanographique Intergouvernementale de l'UNESCO, de nombreux modèles de marégraphes ont été développés suivant le principe du marégraphe à flotteur. Ce type d'instrument était alors le plus répandu dans le monde, représentant plus de 90% des effectifs recensés en service [IOC, 1983]. Notons que le marégraphe de Marseille, installé dans l'Anse Calvo entre 1884 et 1885 par le Service du Nivellement Général de la France, est un modèle singulier de marégraphe à flotteur. Construit par M. Dennert suivant le système imaginé par l'ingénieur allemand Reitz et les modifications indiquées par Ch. Lallemand, il a été mis au point pour satisfaire les spécifications métrologiques du Service du Nivellement, qui cherchait alors à définir de façon rigoureuse l'origine des altitudes en France. Outre son aspect admirable de mécanique de grande précision et de robustesse (il est encore en service !), la caractéristique principale de cet appareil réside dans sa composante totalisateur. Grâce à un agencement astucieux de roulettes et de disques gradués, cette partie permet d'obtenir le niveau moyen de la mer pendant un intervalle de temps quelconque, en totalisant l'aire comprise entre la courbe de marée et un axe d'abscisse. Cette aire, divisée par l'écart de temps correspondant, fournit le niveau moyen. Le croquis de la figure 10 est en fait une représentation schématique du marégraphe-totalisateur de Marseille; la partie totalisateur se trouvant dans l'extrémité gauche du dessin [IGN, 1963]. D'après Vignal [1935], il s'agit d'un instrument unique, bien que deux autres appareils analogues existaient auparavant à Cadix, en Espagne, et sur l'île d'Helgoland, en Allemagne.
Figure 10 : Principe de mesure du marégraphe à flotteur. La figure reprend une vue schématique du marégraphe de Marseille, d'après un document resté sous une version provisoire [IGN, 1963].
Figure 11 : Exemple de marégramme.
Un inconvénient assez important du marégraphe à flotteur est le puits de tranquilisation au fond duquel le flotteur se déplace. L'infrastructure nécessaire pour installer le puits dans des conditions minimales de stabilité n'est pas toujours acquise. Pourtant, cette partie est essentielle dans ce type de marégraphe puisqu'elle protège le flotteur et assure son déplacement vertical. Par ailleurs, le puits de tranquilisation a aussi pour fonction de filtrer les fluctuations de très courte période de la surface de l'eau : vagues, houle, clapotis... De nouveaux types de marégraphes ont été imaginés pour pallier à cet inconvénient, en particulier dans les sites où une telle infrastructure ne pouvait être construite de manière raisonnablement pratique et économique. D'un autre côté, les marégraphes ont été conçus à l'origine pour les besoins de la navigation maritime à proximité des ports et des estuaires. Mais depuis une dizaine d'années, la demande croissante en observations du niveau de la mer pour de nouvelles applications, ainsi que le rapide développement des technologies modernes issues des progrès réalisés dans les Sciences de l'Ingénieur (électronique, informatique, matériaux...), ont favorisé l'apparition de nouvelles techniques de marégraphie. D'autant plus que, aussi bien en France [Simon, 1986] qu'à l'étranger [Scherer, 1986], les organismes responsables des mesures de marégraphie constataient la désuétude de la technique à flotteur et la détérioration de la qualité de ses mesures. Or, les nouvelles applications, aussi bien pratiques que scientifiques, sont souvent exigeantes en termes de précision.
Les autres types de marégraphe sont principalement des marégraphes à capteur de pression (barboteur pneumatique, jauges de contrainte à conducteurs, à semi-conducteurs ou à cristaux de quartz) et des marégraphes acoustiques. Les premiers mesurent la pression exercée par la colonne d'eau et par l'atmosphère au-dessus du point de mesure immergé, qui représente la référence propre à l'instrument. Cette référence est liée au type de capteur. Selon la technique considérée, pneumatique ou jauge de contrainte, il s'agira respectivement de l'extrémité de l'évent pour l'échappement du gaz ou de la surface horizontale de la jauge (diaphragme ou cristaux de quartz). La relation hydrostatique suivante permet de convertir la pression mesurée en hauteur d'eau au dessus de cette référence interne:
Equation (E.II.1)
Les marégraphes à pression sont particulièrement adaptés aux sites dépourvus d'infrastructures importantes, ou encore, aux observatoires qui sont soumis à des conditions environnementales difficiles. Mais, les marégraphes à pression, et plus spécifiquement les marégraphes à capteur de quartz, trouvent un intérêt exclusif dans l'observation des variations du niveau de la mer au large, par petits ou grands fonds.
Le principe de mesure des marégraphes acoustiques, ou marégraphes à ultrasons, est fondé sur la mesure du temps de parcours aller-retour d'une onde acoustique émise au dessus du plan d'eau et réfléchie par ce dernier (cf. figure 12). La connaissance de la vitesse de propagation de l'onde dans l'atmosphère permet alors de convertir la mesure de temps en mesure de distance. Depuis quelques années, la technique de marégraphie acoustique connaît une expansion notable pour l'équipement des observatoires côtiers permanents. Aux États-Unis, le NOS (National Ocean Service) a mis au point son propre instrument acoustique, le NGWLMS: Next Generation Water Level Measurement System, qu'ils ont déjà implanté dans au moins 132 sites [Gill et al, 1993]. Par ailleurs, le NTF (National Tidal Facility) en Australie, et le SHOM (Service Hydrographique et Océanographique de la Marine) en France, ont également développé des systèmes acoustiques analogues, respectivement le SEAFRAME: Sea level Fine Resolution Acoustic Monitoring Equipment [Homes, 1992], et le MCN: Marégraphe Côtier Numérique [Dupuy, 1993]. Le succès de ces marégraphes proviendrait de leur capacité à satisfaire la plupart des exigences à un prix de revient total relativement économique.
Figure 12 : Vue schématique d'un observatoire de niveau de la mer équipé d'un marégraphe acoustique ou à ultrasons.